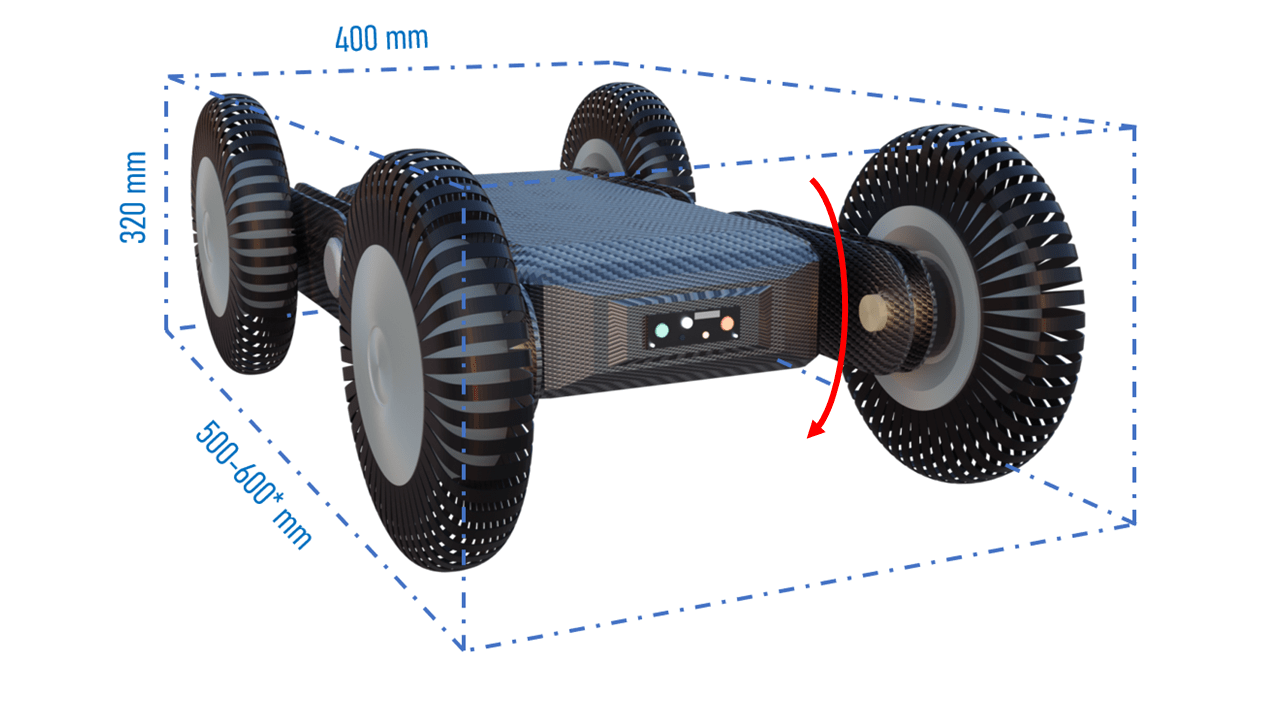
Technologia, którą opracowali Polacy jest teraz bardzo pożądana, bo rozwiązuje wiele problemów z jakimi spotykały się dotychczasowe misje lądujące na ciałach niebieskich (np. przewrócone lądowniki, lądowania w trudniejszym niż przewidywany terenie). Co ważne, testowane dotąd roboty skaczące innych producentów, ze względu na małą energię skoku, mogły skutecznie przemieszczać się jedynie w mikrograwitacji i tej samej technologii nie można zastosować na Księżycu czy Marsie. Inne bazują na wieloczłonowych kroczących konstrukcjach, ale przez to wymagają zużycia dużo energii w krótkim czasie, co skraca czas operacyjny i ogranicza eksplorację większego terenu. Skoczek Astroniki jest bardzo lekki (mniej niż 10kg) i efektywny energetycznie i ma osiągać na Księżycu skoki na wysokość nawet powyżej 3 metrów.
– Nasze rozwiązanie wykorzystuje koncepcję odpychania się od powierzchni za pomocą lekkich nóg tak jak robi to konik polny. Raz zaprojektowany do grawitacji księżycowej, jest łatwo skalowalny także do mniejszych grawitacji. Nasza konstrukcja bazuje na prostocie i wytrzymałości, przy bardzo małym poborze mocy – mówi Łukasz Wiśniewski, kierownik projektu.
Nasi inżynierowie są więc jednymi z pionierów w rozwoju tej innowacyjnej technologii – właśnie oni mogą dokonać przełomu w sposobie eksploracji ciał niebieskich. To dobra wiadomość dla całego polskiego sektora kosmicznego, ponieważ projektowanie i budowa od A do Z robotów skaczących dedykowanych różnym misjom będzie wymagała współpracy wielu podmiotów, a co za tym idzie, będziemy mieli okazję budować unikalny know-how i naszą narodową specjalizację.
Prace nad technologią skoczka zostały sfinansowane przez Europejską Agencję Kosmiczną w ramach programu PLIIS (Polish Industry Incentive Scheme) we współpracy z Centrum Badań Kosmicznych PAN i były możliwe dzięki dobrej koordynacji pomiędzy polskim sektorem kosmicznym a Ministerstwem Rozwoju i Technologii oraz Polską Agencją Kosmiczną.